Drone detection
Augmenting SHORAD systems with electronic support capabilities
By Babak Taghvaee / 15.02.2024

Updated Feb 5th 2021
One of the most frequently-asked questions when discussing our RF drone detection system is: “At what distance are you able to detect drones? How far away can they be and still be picked up by RFeye?” And the answer, as is so often the case, is “it’s complicated” – depending on the conditions, the answer could be anything from many kilometers to tens of meters. So let’s see if we can break it down a little further, and explain a bit more about the factors that affect drone detection distance, and what kind of performance is achievable in the real world.
It’s worth pointing out that for the purposes of this blog, when we refer to drones, we are typically talking about small COTS (commercial-off-the-shelf), or Category 1 drones; these systems will almost invariably be controlled from the ground, so there will be two signals that we can potentially locate: the downlink signal from the drone, and the uplink control signal from the controller on the ground. The downlink usually has narrowband telemetry bursts for guidance, and a wideband video link signal. These signals are often seen in 2.4GHz or 5GHz frequencies, but can also appear on 900MHz as well for certain activity.
As a first approximation, we can consider a perfect environment, with no buildings, trees or any other obstructions between the drone, the controller and the detectors. A typical off-the-shelf drone will have a control signal strength around 19 dBm (this is generally determined by local regulations limiting the allowed power of transmissions). The minimum detectable signal with RFeye Nodes is around -100 dBm, so to find the maximum detectable distance, we need to know how far the signal can travel before its power drops to this level. As we also know the frequency, we can use the Friis Transmission equation to determine what this distance is:
𝑑 = 𝑐/4πν x (𝑃𝑡/𝑃𝑟)
where d is the distance, c is the speed of light, ν is the frequency and Pt and Pr are the transmitted and received powers respectively. For the situation described above (with a 19dBm signal at 5GHz), this gives a figure of around 8km.
(If you’re not familiar with the Friis equation, it’s introduced in our Principles of Geolocation white paper, which can be downloaded here.)
Of course, as we’ve already indicated, this is a pretty unrealistic setup. In most conceivable deployments (at an airport, say), there will be objects of one kind or another between the detector and the drone itself. One of the major strengths of RF detection (when compared to EO or radar) is that RF signals can travel through buildings, so direct line of sight to the target is not always necessary. Nonetheless, some absorption of the signal will take place while passing through, which will result in a reduction of the maximum detection distance. We can estimate the effect of this by assuming that the signal strength drops off as 1/d5,
𝑑 = 𝑐/4πν x (𝑃𝑡/𝑃𝑟)1/5
which gives a maximum detectable distance of a few metres. This, though, is unrealistic in the opposite direction to previously – it’s highly unlikely that the area between detector and drone would be filled with meters of solid wall. In practice, the maximum detectable distance will lie between these two extremes, and will generally be much closer to the former than the latter case.
As we mentioned earlier in this blog, the primary focus is on COTS drones, such as those manufactured by DJI. Even within these kinds of drones that typically operate within the ISM band, the amount of power these drones will be allowed to transmit on will be largely impacted by the country’s regulatory body:
| Regulatory Body | Authorized Transmit Power (in mW) | Signal Strength (in dBm) |
| United States | 25mW | ~13 dBm |
| United Kingdom | 100mW | ~20 dBm |
| Europe | 50mW – 300mW | ~16dBm – ~24dBm |
So, even if the deployed RF detection system has good detection range in one country, it may not necessarily work as well in another country depending on the authorized transmission power of each drone. Frequency also has an influence on the detection range as well; signals at a lower frequency will be detected farther out than signals on higher frequencies, as illustrated below:
Multi-sensor 3D Geolocation Coverage in RFeye Site:
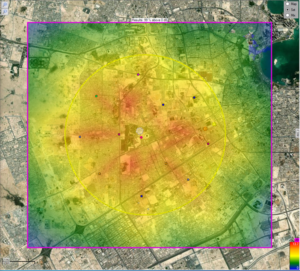
2.4Ghz @ 20dBm
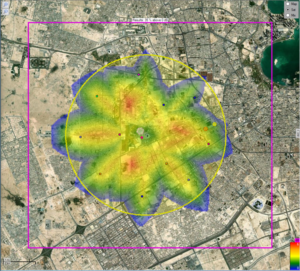
5.8GHz @20dBm
The other major consideration when determining drone detection range is the effect of other signals at the same frequency. Most commercial off-the-shelf drones work in the Wi-Fi bands (2.4 GHz or 5.8GHz), so will be subject to interference from the multitude of WiFi/bluetooth signals permanently being broadcast. In situations where, for example, a wireless access point is significantly closer to the receivers than the drone, it may be impossible to pick out the drone signal from the background noise created. This will be particularly true in dense urban settings. RFeye DroneDefense software can mitigate the effects of this interference with its inbuilt WiFi and Bluetooth reject features, which can identify these signal types by analysis of their keying features, and essentially blacklist them from the analysis. This allows the system to perform drone detection even in busier RF environments.
The video below shows the system undergoing live field trials:
Even a video demonstration can only give an idea of the capabilities of the RFeye DroneDefense system though, so we’re always eager to show just how well it works in a real-life environment. If you would like to arrange a demo, then get in touch with our technical team, and we’ll be happy to set something up for you. It is extremely unlikely that any RF drone detection system will be able to detect out to 8km in the real world, however we’re confident that you’ll be impressed by the results with the CRFS DroneDefense system.


Join thousands of professionals who subscribe for exclusive insights and early access to our reports and analysis.
